
www.endustriweb.com
19
'23
Written on Modified on
AGV ve AMR giderek daha karmaşık hale geliyor
Endüstri 4.0 ve Intralojistik 4.0, üretim ortamını değiştirmekte ve dolayısıyla AGV'leri (Otomatik Kılavuzlu Araçlar) ve AMR'leri (Otonom Mobil Robotlar) etkilemektedir. Markus Fenn ve Prof. Dr. Stefan May, sektörün hızlı ve uygun maliyetli geliştirme yoluyla trendlere ayak uydurmasını sağlamak amacıyla, mevcut trendleri haritalamak için kullanılabilecek bir öğretim ve prototipleme platformu olan Eduard'ı geliştirdi.

BS: Robot platformunuz nasıl ortaya çıktı?
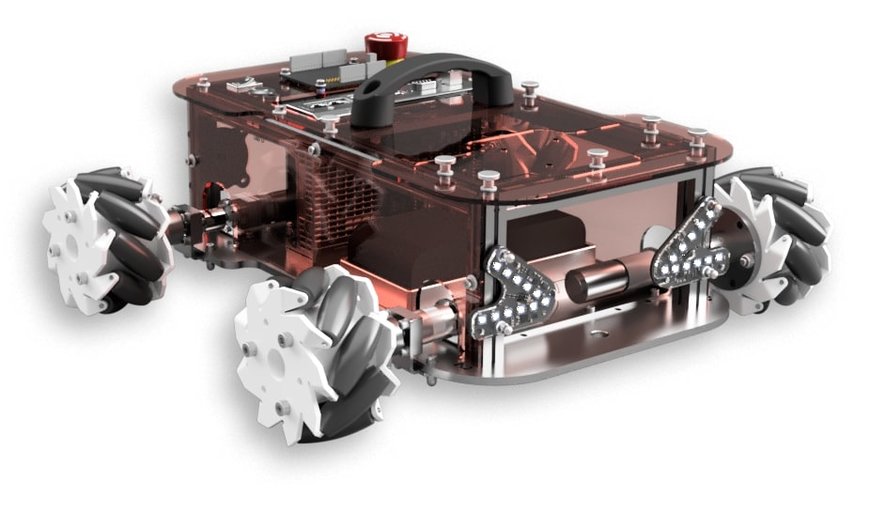
Markus Fenn: Robotun adı Eduard, yaklaşık 40 x 40 x 15 cm boyutlarında ve neredeyse 8 kg ağırlığında. Bir şirketin Prof. Stefan May ile yaptığı bir araştırma sonucunda ortaya çıktı. Şirket, çalışanlarını mobil robotik konusunda eğitmek ve yetiştirmek için bir platforma ihtiyaç duyuyordu. Bu nedenle EduArt Robotik GmbH, robot platformuna ek olarak test ve optimizasyon için bir dizi eğitim ve hizmet teklifiyle birlikte geliyor.
Platform, basit kauçuk lastiklerin yanı sıra mecanum tekerlekler de sunuyor. Bunlar robotun yerinde dönmesine, yanlara veya çapraz olarak hareket etmesine olanak tanıyor. Böylelikle çok dar alanlarda tam konumlandırma ve navigasyon mümkün oluyor. Kauçuk lastikler çoğunlukla açık alanlarda veya kurtarma robotiklerinde test için kullanılıyor, ancak yalnızca varsayımsal senaryolarda. Yüksek kaliteli FAULHABER motorlarının kullanımı her iki uygulama için de ideal.
BS: Robot platformunuzu benzersiz kılan nedir?
Markus Fenn: Platform açık arayüzlere, entegre mesafe ve atalet ölçüm cihazlarına sahip entegre sensör konseptine ve batarya yönetim sistemine (BMS) sahip. Bu temel donanım, müşterinin talebi üzerine ya bizim tarafımızdan ya da müşterinin kendisi tarafından genişletilebilir. Bu sayede müşteri, örneğin gerekli hız veya torka bağlı olarak tahrikin dişli oranını 72:1 veya 89:1 olarak seçebilir. Bu da müşterinin yeni konseptlerini uygun maliyetli bir şekilde test etmesini sağlıyor. Ayrıca uygulama çözümlerinin hayata geçirilmesine de yardımcı oluyoruz.
BS: EduArt'ın sektörde kullanımı ne kadar geçerli?
Markus Fenn: AGV ve AMR otomasyon için giderek daha önemli hale geliyor, ancak ne yazık ki şirketler büyük ölçüde bilgisiz. Örneğin bu robot platformu, yeni bir sensör sisteminin hızlı ve kolay bir şekilde test edilmesini mümkün kılıyor. Ve platform gerektiğinde sanal olarak genişletilebildiğinden, ilgili bilgiyi üretime taşıyabilir.

BS: AGV'ler ve AMR'ler için trendler daha fazla otonomi yönünde. Bir üretim bileşeni 'haline geliyorlar' ve taşıma bantları yerine üretim modülleriyle çalışıyorlar. Dolayısıyla AGV'ler ve AMR'ler zorunluluktan dolayı birlikte çalışıyor. Birbirlerini anlayabiliyorlar mı?
Markus Fenn: AGV'ler ve AMR'ler VDA5050 standart arayüzüne sahiptir ve böylece kontrol merkezi ile de iletişim kurabilirler. Müşteriler Eduard gibi bir platform kullanarak yeni yazılımları kolayca test edebilir ve sonuçlar daha sonra büyük AGV'lere ve AMR'lere 1:1 aktarılabilir. Böylece uygulamalar çok fazla simülasyon olmadan değerlendirilebilir, çünkü yazılım ister Eduard ile ister büyük bir sistemle olsun temelde aynı kalır. Dijital ikiz, planlama ve genişletmeye yardımcı oluken talep üzerine platformla birlikte temin edilebilir.
BS: Eduard'ın tahrik sistemleri AGV ve AMR konseptlerinin gelecekteki gereksinimlerini de karşılamak zorunda. Platform için hangi tahrik sistemlerini kullanıyorsunuz ve neden?
Markus Fenn: Eğitim ve PoC platformumuz için FAULHABER'in değerli metal komütasyonlu DC-mikromotorlarını kullanıyoruz. Küçük boyutlarına rağmen büyük miktarda tork üretebiliyorlar ve özellikle güç açısından verimliler. Ayrıca kontrol edilmeleri kolay ve yüksek hassasiyetli kontrol döngüleri için de uygunlar.
Daha büyük platformlar için, konseptin hızlı bir şekilde kanıtlanmasını sağlamak için aynı üreticinin büyük DC motorlarını kullanıyoruz, örneğin kendi elektroniklerinizle kolay kontrol edilebilirlik bunlardan biri. Gerektiğinde, bunları uygulama için BLDC motorlarla değiştiriyoruz, çünkü bunlar bakım gerektirmiyor ve dayanıklı.

BS: Uzun bir süredir üretim, azalan parti boyutları ve daha fazla sayıda varyant ile karakterize ediliyor. Bunun lojistik ve AGV'ler ile AMR'lerin işlevselliği üzerinde ne gibi etkileri var?
Markus Fenn: Daha küçük yükler için robotlara, yani FAULHABER'in yüksek kaliteli tahrikleri gibi daha küçük ama daha güçlü tahriklere sahip daha küçük robotlara ihtiyacınız var. Bu otonom endüstriyel araçlar daha az elektronik aksam ve daha küçük bataryalara sahip, bu da daha düşük ağırlık ve daha az enerji tüketimi anlamına geliyor. Yükler tekrar artarsa, robotlar yüksek hassasiyetli sürücüler sayesinde çarpışmadan birlikte çalışabildiğinden, ölçek büyütmek ve bir birim olarak çalışmak kolay.
BS: Daha fazla işlevsellik AGV ve AMR'lerde daha fazla karmaşıklık gerektiriyor: Uygulanabilir ve mantıklı olan nedir?
Markus Fenn: AGV'ler ve AMR'ler söz konusu olduğunda sadece yazılım karmaşıktır. Önemli olan, AGV'lerin birlikte sorunsuz bir şekilde çalışabilmesi için planlamadır. Yalnızca paletleri tanımakla kalmayıp aynı zamanda dolu mu boş mu olduklarını ya da belki de eğilmiş olduklarını görmelerini sağlamak için AGV mümkün olduğunca akıllı olmalıdır. İşte bu noktada AI (Yapay Zeka) devreye giriyor. Yapay zeka kullanımıyla kompleksite artar ve küçük robotumuz bunu verimli bir şekilde test etmek için idealdir.
BS: Bir başka trend ise daha büyük otomatik filolar ve bunun için de filo yönetimine ihtiyacınız var.
Markus Fenn: Bunun için robotların birbirleriyle etkileşime girmesi, kendi kendilerine 'düşünmesi', standart arayüzler aracılığıyla bilgi alışverişinde bulunması ve gerekirse işbirliği yapması gerekiyor. AGV/AMR ister küçük ister büyük olsun, yazılım temelde aynıdır, programlardaki fark sadece birkaç satırdır. Yazılımın AMR hakkında çok az bilgiye ihtiyacı vardır. Örneğin, robotun salon planında nerede bulunduğunu hesaplaması gerekir. Robotun boyutlarını bilen birkaç bileşenden biri olan navigasyon, daha sonra uygun yolu arar. Ancak, mobil robotik henüz emekleme aşamasında olduğu için test etmek her zaman önemlidir, bu yüzden henüz çok fazla standart mevcut değildir.
Gerekli hıza ulaşmak için motor kontrolörü gereken tekerlek devir sayısını hesaplar. Bunu ayarlamak için üç satır kod veya bir yapılandırma dosyası gerekir. FAULHABER, hassas konumlandırma için yüksek hassasiyetli dişli kafaları ve enkoderler ile motorlar tedarik ederek optimum performans ve güvenlik sağlar.
BS: Intralojistik 4.0/Endüstri 4.0 ağ bağlantılı AGV'ler ve AMR'ler gerektiriyor: Bulut üzerinden veya daha da iyisi sınır (edge) üzerinden çalışmaya ne dersiniz? Ve güvenlik/hacking bu senaryolara nasıl etki ediyor?
Markus Fenn: Üreticiye bağlı olarak, donanımın internetten ayrılmasıyla sistemler bir dereceye kadar "hacklenemez" hale getirilebilir. Robotlar, duvara çarpmamaları için mesafe sensörlü güvenlik tarayıcılarına sahip. Bu da hacklense bile robotun tehlikeli hareketler yapamayacağı anlamına geliyor. Ve süreç verileri ağ içinde şirket ağının kendisi kadar güvenli.
BS: Endüstri 4.0'ın hedefi kendi kendini organize eden, heterojen, çok modlu sistemlerdir. Bunlar AGV'ler ve AMR'ler arasında veri alışverişini gerektirir ve yapay zekanın da veriye ihtiyacı vardır. FAULHABER bileşenlerinin de veri toplaması ve iletmesi gerektiğinden, bu bileşenler için gereksinimler nelerdir?
Markus Fenn: Bunlar 5G veya şirketin dahili WLAN'ı üzerinden gerçekleşiyor. Sistemler verilere gerçek zamanlı olarak ihtiyaç duymuyor çünkü planlama aşamasındaki veriler mevcut, örneğin rotalar ve hızlar rota planlamasında sistemde bulunuyor ve sürekli değişim gerektirmiyor. Robot bir noktadan diğerine hareket ettiğinde, birkaç saniyede bir yaşam belirtisi göstermesi yeterlidir. Böylece ağları aşırı yüklememek için daha az veri trafiği olur. Verilerin kendisi AMR üzerinde birleştirilir ve orada değerlendirilir. Enkoderler neler olduğunu kaydeder ve kontrolör ile güvenli kontrol sağlar.
BS: AGV'ler ve AMR'ler ne kadar güvenli?
Markus Fenn: Çok güvenli. Dört motordan biri arızalanırsa, motor kontrolörü bunu tanır ve tahriki durdurur. Sürüş alanına bir kişi girerse, bu lazer tarayıcı tarafından algılanır ve sistem fren yapar. Bu iki güvenlik seviyesi yeterli.
BS: Gelecekteki AGV'leri ve AMR'leri geliştirmek için hala hangi alanlarda araştırma yapılması gerekiyor ve test platformunuz bu gereksinimler altında nasıl değişecek? Aynı zamanda tahrik sistemlerine yönelik talepler de artıyor. Geleceğin tahrik sistemi ne olacak?
Markus Fenn: Robotların birbirleriyle daha iyi ağ oluşturması gerekiyor. Örneğin, dört robot bir taşıma görevinde birlikte çalışıyor. Slogan şu: büyük bir robot yerine birçok küçük robot. Bunun için mutlak hassasiyetle çalışması gereken daha fazla sayıda küçük motora ihtiyacınız var, aksi takdirde robot kümesi tökezler veya senkronizasyonunu kaybeder. Güvenilirliği artırmak için, enkoderlerin parazitlere karşı kesinlikle bağışık olması gerekir, böylece robotlar harici parazitlerden etkilenmez. Bu nedenle FAULHABER bazen her motorda iki enkoder kullanır.
FAULHABER'in farklı redüktör varyantlarını farklı uzunlukları ve çapları, enkoderleri, kontrolörleri vb. ile birlikte ele alırsanız, matematiksel olarak 25 milyon kombinasyon oluşturabilirsiniz ve bunların önemli bir kısmı FAULHABER'de zaten uygulanmıştır. Bu da her şirketin gelecekteki uygulamalar için de en uygun tahrikleri bulabileceği anlamına gelir.
